
 Bài giảng Khí cụ điện - Chương 1: Nam châm điện - Nguyễn Văn Ánh
Bài giảng Khí cụ điện - Chương 1: Nam châm điện - Nguyễn Văn ÁnhVí dụ 1 Cho mạch từ như hình 4, có kích thước Ac = Ag = 9cm2, g = 0.05cm, lc= 30cm, và N = 500 vòng. Độ từ thẩm của lõi thép μr là 70000, từ cảm Bc = 1T a)Tính từ trở của lõi thép Rc và khe hở không khí Rg b) Tính từ thôngΦ c)Tính dòng điện i Từ thông móc vòng, Điện cảm, và Năng lượng • Từ thông móc vòng
 20 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 263 | Lượt tải: 0
20 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 263 | Lượt tải: 0 Đề tài Thiết kế bộ điều khiển điện cảm ứng điện dung
Đề tài Thiết kế bộ điều khiển điện cảm ứng điện dung2.1.3 IC7805 Sơ đồ phía dưới IC 7805 có 3 chân: - Chân số 1 là chân IN - Chân số 2 là chân GND - Chân số 3 là chân OUT Hình 2.10 IC7805 Ngõ ra OUT luôn ổn định ở 5V dù điện áp từ nguồn cung cấp thay đổi.Mạch này dùng để bảo vệ những mạch điện chỉ hoạt động ở điện áp 5V (các loại IC thường hoạt động ở điện áp này). Nếu nguồn điện có sự cố độ...
 27 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 280 | Lượt tải: 0
27 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 280 | Lượt tải: 0 Bài tập lớn Thiết kế mạch đo nhiệt độ, độ ẩm sử dụng MSP430G253 và kit phát triển MSP430 của TI
Bài tập lớn Thiết kế mạch đo nhiệt độ, độ ẩm sử dụng MSP430G253 và kit phát triển MSP430 của TI Kết quả thu được sau đề tài này: Do kinh nghiệm còn ít và hạn chế về thời gian cho việc chỉnh sửa nên mạch có phát sinh một số lỗi. • Ưu điểm : - Mạch thực hiện được các chức năng chính theo yêu cầu. - Mạch in đẹp. - Sắp xếp linh kiện đẹp. • Khuyết điểm của mạch: - Mạch chạy chưa được ổn định. Hướng phát triển của đề tài này: - Cải t...
42 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 456 | Lượt tải: 0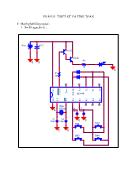 Thiết kế và tính toán mạch hồng ngoại
Thiết kế và tính toán mạch hồng ngoạiChọn tần số dao động : tần số sóng mang mang mã truyền là tần số thu được do vi mạch mã hóa sau khi tiến hành chia 12 lần đối với tần số dao động của bộ cộng hưởng bằng thạch anh được đấu ở bên ngoài . Cho nên mức độ ổn định của tần số này phụ thuộc vào chất lượng và quy cách của thạch anh .Tần số dao động của mạch phát thường là 400-500Khz . Đ...
8 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 382 | Lượt tải: 0 Giới thiệu các linh kiện dùng trong mạch
Giới thiệu các linh kiện dùng trong mạch- Chân 1 (Vss) : là chân mass được nối với cực âm của nguồn điện . - Chân 2 (RXin : là đầu vào tín hiệu thu . - Các chân 3 – 7 (HP1 - HP5) : là đầu ra tín hiệu liên tục . Chỉ cần thu được tín hiệu tương ứng với đầu ra nào thì đầu ra đó sẽ luôn duy trì ở mức logic “1” . - Các chân 8 – 12 (SP5 – SP1) : là đầu ra tín hiệu không liên tục . Chỉ cần ...
11 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 357 | Lượt tải: 0 Giáo trình Đồ điện tử
Giáo trình Đồ điện tửBộ tạo xung chuẩn có chức năng tạo nên các xung thời gian chuẩn có tính ổn định cao, bao gồm các bộ phận: bộ tạo dao động thạch anh, các bộ chia/nhân tần số, bộ tạo dạng xung. Đầu ra của bộ này có nhiều tần số khác nhau như bộ dao động thạch anh 100KHz thì các tần số chia là 10KHz, 1KHz, 100Hz, 10Hz, 1Hz, 0.1Hz tương ứng với các tần số chuẩn nà...
93 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 273 | Lượt tải: 0 Bài giảng Định vị và dẫn điện tử - Chương 8: Kỹ thuật định vị và dẫn đường điện tử
Bài giảng Định vị và dẫn điện tử - Chương 8: Kỹ thuật định vị và dẫn đường điện tửRelative bearing Relative bearing (see NDB Bearings fig , ure, on the rig ) ht) is the angle formed by the intersection of a line drawn through the centerline of the aircraft and a line drawn from the aircraft to the radio station. This angle is always measured clockwise from the nose of the aircraft and is indicated directly by the poin...
87 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 355 | Lượt tải: 0 Bài giảng Định vị và dẫn điện tử - Chương 6
Bài giảng Định vị và dẫn điện tử - Chương 6TWS CONCEPT • Radar scans continually • Computer maintains target tracks –Receives periodic radar scan updates –Builds track history –Predicts positions • TWS = Track-While-Scan!! KEY TO TWS IS: GATE GENERATION • Acquisition gate • Tracking gate • Turning detection gate
46 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 246 | Lượt tải: 0 Bài giảng Định vị và dẫn điện tử - Chương 5
Bài giảng Định vị và dẫn điện tử - Chương 5Radar giám sát thứ cấp SSR • Mode A (simple system): – Aircraft identification (Call-sign) • Mode C (more advanced): – Mode A + altitude • Mode S (more recently): – Mode C + 24 bit address identifier (unambiguous) – Provides limited air-air and air-ground communications – Can also provides whereabouts of other aircraft in its vicinity – Uses digita...
31 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 331 | Lượt tải: 0 Bài giảng Định vị và dẫn điện tử - Chương 4: Nguyên lý và hệ thống Rada
Bài giảng Định vị và dẫn điện tử - Chương 4: Nguyên lý và hệ thống RadaNhận xét - Diện tích phản xạ hiệu dụng có thể lớn hơn hoặc h nhỏ hơn rất hi nhiều so với diện í h tích vật lý của mục tiêu được chiếu xạ. - Khi tần số tăng hoặc giảm thì diện tích phản xạ hiệu dụng radar của cùng một mục tiêu sẽ tăng hoặc giảm. - RCS của mục tiêu hình cầu không phụ thuộc vào tần số Diện tích hiệu dụng Radar của máy bay ném...
38 trang | Chia sẻ: hachi492 | Ngày: 07/01/2022 | Lượt xem: 365 | Lượt tải: 0

